
使用自主机器人选择性收获芦笋
AvL Motion推出突破性的白芦笋选择性收获机,该机器配有图尔克的高精度传感器以及RFID和现场总线技术
荷兰初创企业AvL Motion推出了一款可完全自主式选择性收获白芦笋的机器。在寻找用于控制高度的超声波传感器过程中,该公司发现了图尔克支持IO-Link技术的RU40U。通过后续进一步合作,AvL Motion在其车辆中集成了更多传感器技术,包括微型电感式接近开关、精密编码器以及LE550激光传感器和坚固的Li500-Q25直线位移传感器。AvL还使用TN-Q14 RFID读写头来识别收获模块,并使用TBEN-S2-4IOL紧凑型I/O模块将IO-Link信号传输至PLC。
-turck-image.jpg)







-turck-thumbnail.jpg)








.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
使用带IO-Link接口的超声波传感器进行高度控制
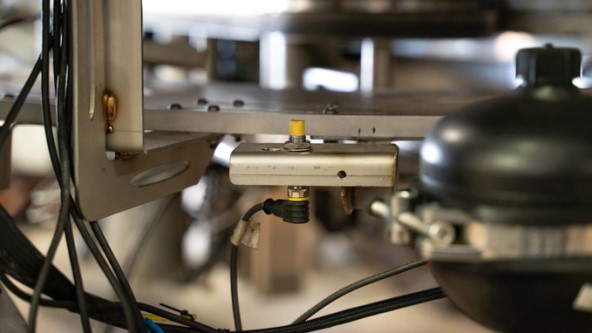
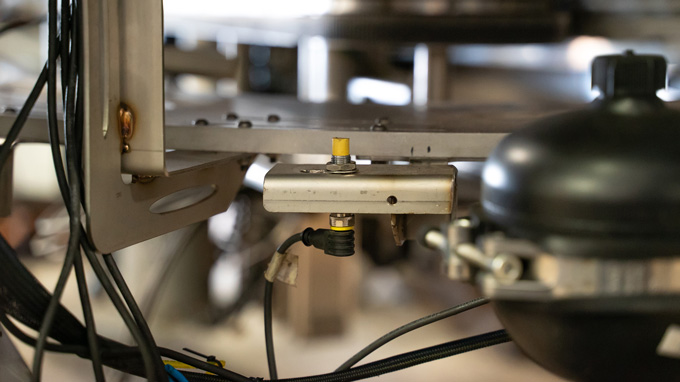
AvL Motion使用2个带IO-Link接口的RU40U超声波传感器来测量芦笋床与机器的气动控制型内部框架间的距离。尽管下层土壤较脏或被雨水侵蚀,传感器仍能稳定测量高度(高度可以在HMI上设置)。“图尔克出色的产品质量和快速发货能力让我们印象深刻。我们将继续与其就其他组件进行合作。”AvL CEO Arno van Lankveld表示。
光电技术取代依赖经验的肉眼识别
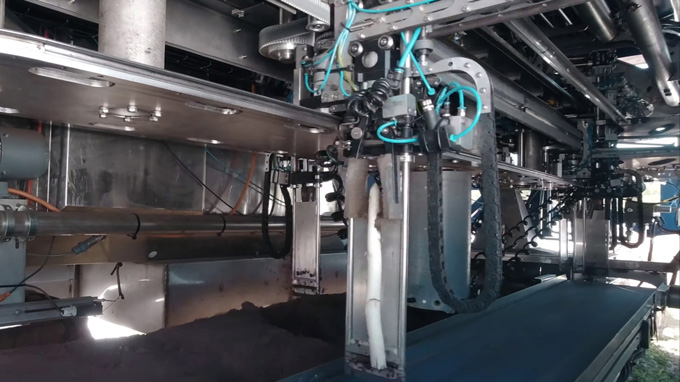
AvL Compact S1560的收获过程是动态变化的。一旦机器完成定位并开始运行,就会扫描土壤的表面。芦笋尖的精确位置通过使用激光传感器和额外的光电过程,由主控制器检测。在收获过程中,数量不一的收获模块围绕机器人内部的圆形轨道移动。目前,这包括12个约25厘米高的盒子。它们按照机器人的速度进行调节,并控制插入、收割和夹取的整个过程。
在目标与收获模块之间进行微调
控制器不仅需要所选芦笋的坐标来微调收获过程,还需关于模块位置和移动的连续信息流。首先它会查询当前缓存区中有多少个盒子,例如有多少个处于停留位置等,然后当前检测到芦笋的盒子会被回路检测到。对此,AvL使用小型的BI3-M08K电感式传感器。对收获模块的精确识别通过RFID技术实现 – 使用的是TN-Q14 HF读写头,该读写头可以读取每个盒子上的独特编码。此外,位置检测通过旋转编码器实现。
电感式传感器触发计时器
一旦收获机启动回路,就会通过NI10U-M12 uprox接近开关,并启动PLC中针对收获过程的计时器的运行。由于芦笋尖不会整齐生长,收获模块除了沿圆形轨道移动外,还可左右移动。这由压缩空气驱动,因此会延迟零点几秒。然而,为了确保盒子的正确对齐,PLC会获取模块初始位置和目标位置间的距离信息(使用图尔克的LE550激光传感器测量)。
利用操纵杆转向
操作人员使用外部控制模块来控制收获机的速度和静液转向。2个图尔克编码器负责测量轮子转数;AvL使用电感式直线位移传感器来测量轮子位置。为此,LI500-Q25传感器的定位元件与转向油缸的活塞相连。这样,主控制器便可使用唯一的数值计算2个轮子的角度,然后操作人员可以轻松使用操纵杆转向。与竞争对手的产品不同,农民无需将AvL Compact S1560固定至拖拉机。
更多信息
- c04b_DOWNLOAD-Item 37617 [PDF, MB]
- 视频(YouTube):完全自主的白芦笋收获机器人
- 概览:适用于多种工业应用的编码器产品组合
- 产品链接:超声波传感器RU40U-M18E-LIU2PN8X2T-H1151
- 产品链接:接近开关BI3-M08K-AP6X-V1131
- 产品链接:接近开关NI10U-M12-AP6X-H1141
- 产品链接:电感式直线位移传感器LI500P0-Q25LM0-LIU5X3-H1151
- 产品链接:光电传感器LE550IQ
- 产品链接:带IO-Link的光电传感器 LE550KQ
- 产品链接:HF-RFID读写头TN-Q14-0.15-RS4.47T
- 产品链接:紧凑型多协议I/O模块TBEN-S2-4IOL
- 阅读全文:芦笋收获 先锋 – more12050e [PDF, 1,42 MB]
- 汽车
- 滤清器生产中的模块化灵活性和安全性
- 采用带集成电流监测功能的智能电缆防止输送系统意外停机
- 电感式耦合型传感器确保精确送料
- 利用直接MES连接进行装配管理
- RFID在汽车识别中的端到端应用
- 汽车生产中的可靠滑橇检测
- 准确无误的保险杠JIS订单拣选
- RFID Bus Mode模式确保锂离子电池的质量
- 浸涂生产线中的液位测量
- 中央润滑系统中的液位控制
- 涂胶机器人的质量保证
- 倾角计加快平台的对准
- 状态监测的电机控制
- IP67 I/O模块处理安全信号
- 使用RFID技术对冷却站进行分布式监测
- 机器人焊接单元与以太网联网
- 监测焊接夹紧装置的冷却回路
- 滚筒式清洗机的流量监测
- 电机的集中状态监测
- 轻松监测CNC铣床中的冷却润滑剂
- 冲压车间 – 工具识别(RFID)
- 涂装车间 — 滑橇识别
- 最终装配 – 机器人装配
- 运输托盘的非接触式验证
- 利用UHF RFID技术的物料检测
- 监测机床冷却剂的供应
- 控制冲压设备的液压
- 测量剪叉式升降机的过程压力
- 成功案例
- 化工
- 能源
- 食品饮料
- 物流
- 用于传送带上货物识别的 UHF RFID 通道
- 防止物流中心的包裹堵塞
- 输送机模块的分布式控制
- 使用RFID技术跟踪集装袋
- 集装箱起重机的距离检测
- 受保护区域的访问控制
- 分布式屏蔽电敏保护设备
- BLOCK I/O 控制滚筒输送机模块
- 仓储安全门的快速标签检测
- 使用UHF RFID进行物料检测
- 输送带的预防性维护
- 运输容器检测
- 容器中的液位检测
- 低温容器的识别
- 用手持设备识别移动容器
- 食品容器的识别
- 顺序化缓冲器识别
- 储藏室的状态监测
- 正面吊的防撞保护
- 成功案例
- 物流:RFID助力降低99%的错误率
- RFID:避免三次交付错误后成功实现投资回报
- 利用 RFID 技术对 RTI 进行可持续跟踪
- RFID与高频总线模式简化种子存储
- RFID实现建筑工地的材料和工具的随心配置
- I/O和安全模块助力提升内部物流的效率
- 原材料的运输跟踪
- RFID跟踪解决方案减少装载错误
- 出入库材料的RFID跟踪
- 分布式UHF RFID解决方案
- 马铃薯生产中的非接触式编码器
- 冷库中的IP67 PLC 分布式控制模块
- 通过QT50雷达传感器进行速度控制
- IP67防护等级电源模块
- 模块化输送系统
- RFID仓储自动化
- RFID在悬挂系统生产过程中导引AGV
- 使用RFID技术识别药物
- 食品配送中心的超高频UHF RFID
- 移动设备
- 石油和天然气
- 包装
- 制药
- 半导体
选择国家
图尔克全球